Robot “bộ xương ngoài” của Việt Nam
PGS. TS. Đào Văn Hiệp, Th.S. Trần Xuân Thảnh, khoa hàng không vũ trụ, Học viện kỹ thuật quân sự đã chế tạo thành công robot bộ xương ngoài, còn gọi là Exoskeleton (Exo), một loại robot sinh học trợ giúp người đi bộ. Nó rất hữu dụng cho người cần mang vác nặng hoặc bị khuyết tật.
PGS. TS. Đào Văn Hiệp cho biết, Exo là loại robot đặc biệt, khác về bản chất với các loại robot công nghiệp và robot di động thông thường: không làm việc độc lập mà được "mặc" vào người, hoạt động như một bộ phận của cơ thể, hệ thống luôn luôn gồm robot và người mang; mở rộng, tăng cường, hoàn thiện khả năng của các bộ phận của cơ thể hoặc thay thế các bộ phận đó trong trường hợp chúng bị hỏng; không làm việc trong môi trường có cấu trúc định trước mà có thể phản ứng linh hoạt trong môi trường biến động.
Exo kết hợp được năng lực trí tuệ (khả năng xử lý tình huống một cách thông minh, linh hoạt) của người mang và năng lực vật lý (sức mạnh, tầm hoạt động, tốc độ, chịu sự khắc nghiệt của môi trường, như: nóng, độc,...) của robot. Trước đây, Exo được coi là một đối tượng nghiên cứu điển hình của ngành cơ - sinh học (bio-mechanics), nhưng nay nó gợi lên một khái niệm mới: cơ - sinh - điện tử (bio-mechatronics).
Kết cấu cơ khí của Exo được đặt song song với cơ cấu vận động của cơ thể, nhằm đỡ hầu hết tải trọng và hoạt động theo tín hiệu điều khiển từ con người. Robot và người được tích hợp thành một hệ thống nhất, hoạt động đồng bộ với nhau. Giữa người và Exo song song tồn tại 2 loại tương tác: tương tác thông tin và tương tác cơ học, thông qua một giao diện đặc biệt người - robot (human - robot interface - HRi).
Robot nhận tín hiệu điều khiển từ cơ thể, đồng thời người cũng cảm nhận được trạng thái và hoạt động của robot. Tương tác thông tin giữa người và robot phần lớn là vô thức, nghĩa là con người hoạt động với robot như với một bộ phận của cơ thể, điều khiển robot và cảm nhận về robot một cách bản năng, không cần có chủ định trước.
Phương tiện cảm nhận có thể là tự nhiên, thông qua các giác quan; có thể là nhân tạo, dùng các thiết bị đo thông số động học (góc, vận tốc, gia tốc), động lực học (lực, mô men) sinh ra do chuyển động của các khớp hoặc các thiết bị chuyên dùng: điện não đồ (EEG), điện nhãn đồ (ENG), điện cơ đồ (EMG).
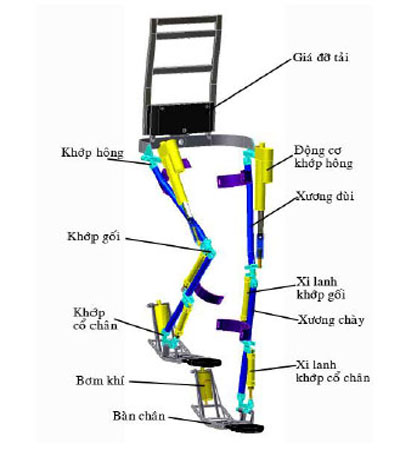
Nhóm nghiên cứu đã chế tạo đến 3 mẫu robot. Mẫu 1 nhằm thử nghiệm kết cấu cơ khí và lấy tín hiệu góc từ các khớp, khảo sát về động học (quy luật biến thiên các góc khớp khi đạp xe và đi bộ). Hệ điều khiển chỉ là bộ thu nhận kết quả đo và hiển thị kết quả trên máy tính. Mẫu 2 được thiết kế gồm có 6 khớp: 3 khớp hông, 1 khớp gối, 2 khớp cổ chân.
Nó được hoàn thiện so với mẫu 1 ở chỗ có động cơ dẫn động các khớp. Hệ điều khiển có thêm chức năng điều khiển các động cơ bám theo động học các khớp (được lấy từ các sensor đo góc tại các khớp). Hệ dẫn động khớp hông là động cơ điện servo, có gắn giảm tốc và vít me đai ốc để biến chuyển động quay của rotor động cơ thành chuyển động tịnh tiến, thay cho sự co, giãn của cơ đùi. Động cơ dẫn động khớp gối và khớp cổ chân là các xi lanh khí nén.
Như vậy, trong mẫu 2, nếu dùng tất cả các động cơ thì robot được dẫn động hoàn toàn. Thử nghiệm thực tế cho thấy truyền động điện - cơ có nhược điểm là cứng, bắt buộc phải dẫn động liên tục với quy luật khắt khe. Trong mẫu 3, hệ truyền động điện - cơ của khớp hông được thay bằng xi lanh khí nén. Về điều khiển, ngoài các sensor đo góc các khớp, mẫu 3 được trang bị thêm hệ sensor EMG. Đây là hệ sensor hoàn chỉnh, chuyên dùng cho nghiên cứu cơ sinh học và bio-robot, có thể thực hiện đồng bộ các giai đoạn thu nhận và xử lý tín hiệu từ sensor EMG, đưa ra tín hiệu anolog và tín hiệu số, đưa vào PC để xử lý và điều khiển.
Theo Th.S.Trần Xuân Thảnh, nhóm nghiên cứu chọn phương pháp điều khiển theo kiểu trợ lực gián đoạn cho các khớp ở thời điểm cần sinh lực để di chuyển, sau đó thả lỏng để cho robot hoạt động theo chu trình tự nhiên (chu trình này không cần trợ lực).
Thời điểm trợ lực dựa vào góc quay và chu trình động lực học của robot. Phần mềm điều khiển thực hiện các chức năng: thu nhận và xử lý dữ tín hiệu từ các sensor đo góc các khớp, xung điện từ hoạt động của cơ (EMG); hiển thị tín hiệu dưới dạng đồ thị để phục vụ cho việc phân tích, đánh giá, đồng thời giám sát và điều khiển quá trình; điều khiển hệ chấp hành, thực hiện việc di chuyển theo tín hiệu động học và động lực học.
Mẫu thứ 3 của nhóm nghiên cứu đã giải quyết được những vấn đề cơ bản, do ứng dụng kỹ thuật mới. Với giải pháp kết cấu và điều khiển nói trên, Exo có tác dụng trợ lực được thể hiện rất rõ ràng. Robot đã được thử nghiệm với các chế độ làm việc khác nhau: không và có mang tải (tổng tải trọng là 20kg), có hỗ trợ (cấp khí nén) và không hỗ trợ, đi trên băng thử và đi trên mặt bằng, leo cầu thang,...
Khi thử nghiệm, tín hiệu EMG được ghi lại để đánh giá lực cơ. Kết quả rất khả quan: tải trọng cõng trên lưng robot không đè lên người, lực tại cơ bắp chân khi mang tải không tăng so với khi không tải và còn nhỏ hơn khi không tải mà không có hỗ trợ.
Theo khoahocphothong
Tin cùng chuyên mục
- Khắc phục sự cố không đăng nhập được VNeID trên thiết bị mới 01.04.2025 | 11:10 AM
- Toàn văn: Nghị quyết số 57-NQ/TW về đột phá phát triển khoa học, công nghệ, đổi mới sáng tạo và chuyển đổi số quốc gia 13.01.2025 | 10:08 AM
- Quyết tâm chuyển đổi số sâu rộng, toàn diện, thực chất, hiệu quả 17.10.2024 | 15:31 PM
- Sóng nhiệt kỷ lục ở Nam cực đe dọa tương lai Trái đất 06.08.2024 | 09:46 AM
- 201 thí sinh tham gia Hội thi tin học trẻ tỉnh Thái Bình năm 2024 10.06.2024 | 19:17 PM
- Tổng kết và trao giải hội thi, cuộc thi sáng tạo khoa học năm 2022 - 2023 18.12.2023 | 16:35 PM
- Hội thảo khoa học về vai trò của khoa học và công nghệ trong việc sản xuất, tiêu thụ và phát triển sản phẩm nông nghiệp 16.12.2023 | 14:38 PM
- Hội nghị khoa học về chẩn đoán và điều trị bệnh lý tim mạch 28.10.2023 | 12:02 PM
- Ứng dụng công nghệ sinh học trong sản xuất nước mắm 15.02.2023 | 18:51 PM
- Tàu container lớn nhất thế giới 13.02.2023 | 08:42 AM
Xem tin theo ngày
-
 Đặc sắc chương trình nghệ thuật kỷ niệm 110 năm ngày sinh Tổng Bí thư Nguyễn Văn Linh và chào mừng hợp nhất tỉnh Hưng Yên và tỉnh Thái Bình
Đặc sắc chương trình nghệ thuật kỷ niệm 110 năm ngày sinh Tổng Bí thư Nguyễn Văn Linh và chào mừng hợp nhất tỉnh Hưng Yên và tỉnh Thái Bình
- Chủ tịch Ủy ban Trung ương MTTQ Việt Nam Đỗ Văn Chiến thăm làm việc tại phường Phố Hiến
- Công bố nghị quyết, quyết định của Trung ương, địa phương về sáp nhập đơn vị hành chính cấp tỉnh, cấp xã và kết thúc hoạt động cấp huyện
- Báo Thái Bình - Một hành trình với những mốc son lịch sử
- Thư tòa soạn
- Công bố quyết định của Bộ trưởng Bộ Công an, Giám đốc Công an tỉnh về công tác tổ chức, cán bộ
- Khởi công dự án nhà máy đốt chất thải rắn phát điện công nghệ hiện đại tại xã Thụy Trình
- Khởi công dự án đầu tư xây dựng sân golf Cồn Vành và dự án đầu tư xây dựng khu bến cảng hàng lỏng Ba Lạt
- Việt Nam nâng tầm vị thế tại Hội nghị quốc tế về biển và đại dương
- Hội thảo khoa học: Đồng chí Nguyễn Văn Linh – Nhà lãnh đạo kiên định, sáng tạo của Đảng và cách mạng Việt Nam